Part 1: Boosting and Ensembling¶
We are now going to look at ways in which multiple machine learning can be combined.
In particular, we will look at a way of combining models called boosting.
Review: Overfitting¶
Overfitting is one of the most common failure modes of machine learning.
- A very expressive model (a high degree polynomial) fits the training dataset perfectly.
- The model also makes wildly incorrect prediction outside this dataset, and doesn't generalize.
Review: Bagging¶
The idea of bagging is to reduce overfitting by averaging many models trained on random subsets of the data.
for i in range(n_models):
# collect data samples and fit models
X_i, y_i = sample_with_replacement(X, y, n_samples)
model = Model().fit(X_i, y_i)
ensemble.append(model)
# output average prediction at test time:
y_test = ensemble.average_prediction(y_test)
The data samples are taken with replacement and known as bootstrap samples.
Review: Underfitting¶
Underfitting is another common problem in machine learning.
- The model is too simple to fit the data well (e.g., approximating a high degree polynomial with linear regression).
- As a result, the model is not accurate on training data and is not accurate on new data.
Boosting¶
The idea of boosting is to reduce underfitting by combining models that correct each others' errors.
- As in bagging, we combine many models $g_t$ into one ensemble $f$.
- Unlike bagging, the $g_t$ are small and tend to underfit.
- Each $g_t$ fits the points where the previous models made errors.
Weak Learners¶
A key ingredient of a boosting algorithm is a weak learner.
- Intuitively, this is a model that is slightly better than random.
- Examples of weak learners include: small linear models, small decision trees.
Structure of a Boosting Algorithm¶
The idea of boosting is to reduce underfitting by combining models that correct each others' errors.
- Fit a weak learner $g_0$ on dataset $\mathcal{D} = \{(x^{(i)}, y^{(i)})\}$. Let $f=g$.
- Compute weights $w^{(i)}$ for each $i$ based on model predictions $f(x^{(i)})$ and targets $y^{(i)}$. Give more weight to points with errors.
- Fit another weak learner $g_1$ on $\mathcal{D} = \{(x^{(i)}, y^{(i)})\}$ with weights $w^{(i)}$.
- Set $f_1 = g_0 + \alpha_1 g$ for some weight $\alpha_1$. Go to Step 2 and repeat.
In Python-like pseudocode this looks as follows:
weights = np.ones(n_data,)
for i in range(n_models):
model = SimpleBaseModel().fit(X, y, weights)
predictions = model.predict(X)
weights = update_weights(weights, predictions)
ensemble.add(model)
# output consensus prediction at test time:
y_test = ensemble.consensus_prediction(y_test)
Origins of Boosting¶
Boosting algorithms were initially developed in the 90s within theoretical machine learning.
- Originally, boosting addressed a theoretical question of whether weak learners with >50% accuracy can be combined to form a strong learner.
- Eventually, this research led to a practical algorithm called Adaboost.
Today, there exist many algorithms that are considered types of boosting, even though they were not derived from a theoretical angle.
Algorithm: Adaboost¶
- Type: Supervised learning (classification).
- Model family: Ensembles of weak learners (often decision trees).
- Objective function: Exponential loss.
- Optimizer: Forward stagewise additive model building.
Defining Adaboost¶
One of the first practical boosting algorithms was Adaboost.
We start with uniform $w^{(i)} = 1/n$ and $f = 0$. Then for $t=1,2,...,T$:
- Fit weak learner $g_t$ on $\mathcal{D}$ with weights $w^{(i)}$.
- Compute misclassification error $e_t = \frac{\sum_{i=1}^n w^{(i)} \mathbb{I}\{y^{(i)} \neq f(x^{(i)})\}}{\sum_{i=1}^n w^{(i)}}$
- Compute model weight $\alpha_t = \log[(1-e_t)/e_t]$. Set $f \gets f + \alpha_t g_t$.
- Compute new data weights $w^{(i)} \gets w^{(i)}\exp[\alpha_t \mathbb{I}\{y^{(i)} \neq f(x^{(i)})\} ]$.
Adaboost: An Example¶
Let's implement Adaboost on a simple dataset to see what it can do.
Let's start by creating a classification dataset.
# https://scikit-learn.org/stable/auto_examples/ensemble/plot_adaboost_twoclass.html
import numpy as np
from sklearn.datasets import make_gaussian_quantiles
# Construct dataset
X1, y1 = make_gaussian_quantiles(cov=2., n_samples=200, n_features=2, n_classes=2, random_state=1)
X2, y2 = make_gaussian_quantiles(mean=(3, 3), cov=1.5, n_samples=300, n_features=2, n_classes=2, random_state=1)
X = np.concatenate((X1, X2))
y = np.concatenate((y1, - y2 + 1))
We can visualize this dataset using matplotlib.
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = [12, 4]
# Plot the training points
plot_colors, plot_step, class_names = "br", 0.02, "AB"
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
for i, n, c in zip(range(2), class_names, plot_colors):
idx = np.where(y == i)
plt.scatter(X[idx, 0], X[idx, 1], cmap=plt.cm.Paired, s=60, edgecolor='k', label="Class %s" % n)
plt.xlim(x_min, x_max)
plt.ylim(y_min, y_max)
plt.legend(loc='upper right')
<matplotlib.legend.Legend at 0x12afda198>

Let's now train Adaboost on this dataset.
from sklearn.ensemble import AdaBoostClassifier
from sklearn.tree import DecisionTreeClassifier
# Create and fit an AdaBoosted decision tree
bdt = AdaBoostClassifier(DecisionTreeClassifier(max_depth=1),
algorithm="SAMME",
n_estimators=200)
bdt.fit(X, y)
AdaBoostClassifier(algorithm='SAMME',
base_estimator=DecisionTreeClassifier(max_depth=1),
n_estimators=200)
Visualizing the output of the algorithm, we see that it can learn a highly non-linear decision boundary to separate the two classes.
xx, yy = np.meshgrid(np.arange(x_min, x_max, plot_step), np.arange(y_min, y_max, plot_step))
# plot decision boundary
Z = bdt.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
cs = plt.contourf(xx, yy, Z, cmap=plt.cm.Paired)
# plot training points
for i, n, c in zip(range(2), class_names, plot_colors):
idx = np.where(y == i)
plt.scatter(X[idx, 0], X[idx, 1], cmap=plt.cm.Paired, s=60, edgecolor='k', label="Class %s" % n)
plt.xlim(x_min, x_max)
plt.ylim(y_min, y_max)
plt.legend(loc='upper right')
<matplotlib.legend.Legend at 0x12b3b8438>

Ensembling¶
Boosting and bagging are special cases of ensembling.
The idea of ensembling is to combine many models into one. Bagging and Boosting are ensembling techniques to reduce over- and under-fitting.
- In stacking, we train $m$ independent models $g_j(x)$ (possibly from different model classes) and then train another model $f(x)$ to prodict $y$ from the outputs of the $g_j$.
- The Bayesian approach can also be seen as form of ensembling $$ P(y\mid x) = \int_\theta P(y\mid x,\theta) P(\theta \mid \mathcal{D}) d\theta $$ where we average models $P(y\mid x,\theta)$ using weights $P(\theta \mid \mathcal{D})$.
Pros and Cons of Ensembling¶
Ensembling is a useful tecnique in machine learning.
- It often helps squeeze out additional performance out of ML algorithms.
- Many algorithms (like Adaboost) are forms of ensembling.
Disadvantages include:
- It can be computationally expensive to train and use ensembles.

Part 2: Additive Models¶
Next, we are going to see another perspective on boosting and derive new boosting algorithms.
Review: Underfitting¶
Underfitting is another common problem in machine learning.
- The model is too simple to fit the data well (e.g., approximating a high degree polynomial with linear regression).
- As a result, the model is not accurate on training data and is not accurate on new data.
Review: Boosting¶
The idea of boosting is to reduce underfitting by combining models that correct each others' errors.
- As in bagging, we combine many models $g_i$ into one ensemble $f$.
- Unlike bagging, the $g_i$ are small and tend to underfit.
- Each $g_i$ fits the points where the previous models made errors.
Additive Models¶
Boosting can be seen as a way of fitting an additive model: $$ f(x) = \sum_{t=1}^T \alpha_t g(x; \phi_t). $$
- The main model $f(x)$ consists of $T$ smaller models $g$ with weights $\alpha_t$ and paramaters $\phi_t$.
- The parameters are the $\alpha_t$ plus the parameters $\phi_t$ of each $g$.
This is more general than a linear model, because $g$ can be non-linear in $\phi_t$ (therefore so is $f$).
Example: Boosting Algorithms¶
Boosting is one way of training additive models.
- Fit a weak learner $g_0$ on dataset $\mathcal{D} = \{(x^{(i)}, y^{(i)})\}$. Let $f=g$.
- Compute weights $w^{(i)}$ for each $i$ based on model predictions $f(x^{(i)})$ and targets $y^{(i)}$. Give more weight to points with errors.
- Fit another weak learner $g_1$ on $\mathcal{D} = \{(x^{(i)}, y^{(i)})\}$ with weights $w^{(i)}$.
- Set $f_1 = g_0 + \alpha_1 g$ for some weight $\alpha_1$. Go to Step 2 and repeat.
Forward Stagewise Additive Modeling¶
A general way to fit additive models is the forward stagewise approach.
- Suppose we have a loss $L : \mathcal{Y} \times \mathcal{Y} \to [0, \infty)$.
- Start with $f_0 = \arg \min_\phi \sum_{i=1}^n L(y^{(i)}, g(x^{(i)}; \phi))$.
- At each iteration $t$ we fit the best addition to the current model. $$ \alpha_t, \phi_t = \arg\min_{\alpha, \phi} \sum_{i=1}^n L(y^{(i)}, f_{t-1}(x^{(i)}) + \alpha g(x^{(i)}; \phi))$$
Practical Considerations¶
- Popular choices of $g$ include cubic splines, decision trees and kernelized models.
- We may use a fix number of iterations $T$ or early stopping when the error on a hold-out set no longer improves.
- An important design choice is the loss $L$.
Exponential Loss¶
Give a binary classification problem with labels $\mathcal{Y} = \{-1, +1\}$, the exponential loss is defined as
$$ L(y, f) = \exp(-y \cdot f). $$- When $y=1$, $L$ is small when $f \to \infty$.
- When $y=-1$, $L$ is small when $f \to - \infty$.
Let's visualize the exponential loss and compare it to other losses.
from matplotlib import pyplot as plt
import numpy as np
plt.rcParams['figure.figsize'] = [12, 4]
# define the losses for a target of y=1
losses = {
'Hinge' : lambda f: np.maximum(1 - f, 0),
'L2': lambda f: (1-f)**2,
'L1': lambda f: np.abs(f-1),
'Exponential': lambda f: np.exp(-f)
}
# plot them
f = np.linspace(0, 2)
fig, axes = plt.subplots(2,2)
for ax, (name, loss) in zip(axes.flatten(), losses.items()):
ax.plot(f, loss(f))
ax.set_title('%s Loss' % name)
ax.set_xlabel('Prediction f')
ax.set_ylabel('L(y=1,f)')
plt.tight_layout()

Special Case: Adaboost¶
Adaboost is an instance of forward stagewise additive modeling with the expoential loss.
At each step $t$ we minimize $$L_t = \sum_{i=1}^n e^{-y^{(i)}(f_{t-1}(x^{(i)}) + \alpha g(x^{(i)}; \phi))} = \sum_{i=1}^n w^{(i)} \exp\left(-y^{(i)}\alpha g(x^{(i)}; \phi)\right) $$ with $w^{(i)} = \exp(-y^{(i)}f_{t-1}(x^{(i)}))$.
We can derive the Adaboost update rules from this equation.
Suppose that $g(y; \phi) \in \{-1,1\}$. With a bit of algebraic manipulations, we get that: \begin{align*} L_t & = e^{\alpha} \sum_{y^{(i)} \neq g(x^{(i)})} w^{(i)} + e^{-\alpha} \sum_{y^{(i)} = g(x^{(i)})} w^{(i)} \\ & = (e^{\alpha} - e^{-\alpha}) \sum_{i=1}^n w^{(i)} \mathbb{I}\{{y^{(i)} \neq g(x^{(i)})}\} + e^{-\alpha} \sum_{i=1}^n w^{(i)}.\\ \end{align*} where $\mathbb{I}\{\cdot\}$ is the indicator function.
From there, we get that: \begin{align*} \phi_t & = \arg\min_{\phi} \sum_{i=1}^n w^{(i)} \mathbb{I}\{{y^{(i)} \neq g(x^{(i)}; \phi)}\} \\ \alpha_t & = \log[(1-e_t)/e_t] \end{align*} where $e_t = \frac{\sum_{i=1}^n w^{(i)} \mathbb{I}\{y^{(i)} \neq f(x^{(i)})\}}{\sum_{i=1}^n w^{(i)}\}}$.
These are update rules for Adaboost, and it's not hard to show that the update rule for $w^{(i)}$ is the same as well.
Squared Loss¶
Another popular choice of loss is the squared loss. $$ L(y, f) = (y-f)^2. $$
The resulting algorithm is often called L2Boost. At step $t$ we minimize $$\sum_{i=1}^n (r^{(i)}_t - g(x^{(i)}; \phi))^2, $$ where $r^{(i)}_t = y^{(i)} - f(x^{(i)})_{t-1}$ is the residual from the model at time $t-1$.
Logistic Loss¶
Another common loss is the log-loss. When $\mathcal{Y}=\{-1,1\}$ it is defined as:
$$L(y, f) = \log(1+\exp(-2\cdot y\cdot f)).$$This looks like the log of the exponential loss; it is less sensitive to outliers since it doesn't penalize large errors as much.
from matplotlib import pyplot as plt
import numpy as np
plt.rcParams['figure.figsize'] = [12, 4]
# define the losses for a target of y=1
losses = {
'Hinge' : lambda f: np.maximum(1 - f, 0),
'L2': lambda f: (1-f)**2,
'Logistic': lambda f: np.log(1+np.exp(-2*f)),
'Exponential': lambda f: np.exp(-f)
}
# plot them
f = np.linspace(0, 2)
fig, axes = plt.subplots(2,2)
for ax, (name, loss) in zip(axes.flatten(), losses.items()):
ax.plot(f, loss(f))
ax.set_title('%s Loss' % name)
ax.set_xlabel('Prediction f')
ax.set_ylabel('L(y=1,f)')
ax.set_ylim([0,1])
plt.tight_layout()

In the context of boosting, we minimize $$J(\alpha, \phi) = \sum_{i=1}^n \log\left(1+\exp\left(-2y^{(i)}(f_{t-1}(x^{(i)}) + \alpha g(x^{(i)}; \phi)\right)\right).$$
This give a different weight update compared to Adabost. This algorithm is called LogitBoost.
Pros and Cons of Boosting¶
The boosting algorithms we have seen so far improve over Adaboost.
- They optimize a wide range of objectives.
- Thus, they are more robust to outliers and extend beyond classification.
Cons:
- Computational time is still an issue.
- Optimizing greedily over each $\phi_t$ can take time.
- Each loss requires specialized derivations.
Summary¶
- Additive models have the form $$ f(x) = \sum_{t=1}^T \alpha_t g(x; \phi_t). $$
- These models can be fit using the forward stagewise additive approach.
- This reproduces Adaboost and can be used to derive new boosting-type algorithms.
Part 3: Gradient Boosting¶
We are now going to see another way of deriving boosting algorithms that is inspired by gradient descent.
Review: Boosting¶
The idea of boosting is to reduce underfitting by combining models that correct each others' errors.
- As in bagging, we combine many models $g_i$ into one ensemble $f$.
- Unlike bagging, the $g_i$ are small and tend to underfit.
- Each $g_i$ fits the points where the previous models made errors.
Review: Additive Models¶
Boosting can be seen as a way of fitting an additive model: $$ f(x) = \sum_{t=1}^T \alpha_t g(x; \phi_t). $$
- The main model $f(x)$ consists of $T$ smaller models $g$ with weights $\alpha_t$ and paramaters $\phi_t$.
- The parameters are the $\alpha_t$ plus the parameters $\phi_t$ of each $g$.
This is not a linear model, because $g$ can be non-linear in $\phi_t$ (therefore so is $f$).
Review: Forward Stagewise Additive Modeling¶
A general way to fit additive models is the forward stagewise approach.
- Suppose we have a loss $L : \mathcal{Y} \times \mathcal{Y} \to [0, \infty)$.
- Start with $f_0 = \arg \min_\phi \sum_{i=1}^n L(y^{(i)}, g(x^{(i)}; \phi))$.
- At each iteration $t$ we fit the best addition to the current model. $$ \alpha_t, \phi_t = \arg\min_{\alpha, \phi} \sum_{i=1}^n L(y^{(i)}, f_{t-1}(x^{(i)}) + \alpha g(x^{(i)}; \phi))$$
Losses for Additive Models¶
We have seen several losses that can be used with the forward stagewise additive approach.
- The exponential loss $L(y,f) = \exp(-yf)$ gives us Adaboost.
- The log-loss $L(y,f) = \log(1+\exp(-2yf))$ is more robust to outliers.
- The squared loss $L(y,f) = (y-f)^2$ can be used for regression.
Limitations of Forward Stagewise Additive Modeling¶
Forward stagewise additive modeling is not without limitations.
- There may exist other losses for which it is complex to derive boosting-type weight update rules.
- At each step, we may need to solve a costly optimization problem over $\phi_t$.
- Optimizing each $\phi_t$ greedily may cause us to overfit.
Functional Optimization¶
Functional optimization offers a different angle on boosting algorithms and a recipe for new algorithms.
- Consider optimizing a loss over arbitrary functions $f: \mathcal{X} \to \mathcal{Y}$.
- Functional optimization consists in solving the problem $$ \min_f \sum_{i=1}^n L(y^{(i)}, f(x^{(i)})). $$ over the space of all possible $f$.
- It's easiest to think about $f$ as an infinite dimensional vector indexed by $x \in \mathcal{X}$.
To simplify our explanations, we will assume that there exists a true deterministic mapping $$f^* : \mathcal{X} \to \mathcal{Y}$$ between $\mathcal{X}$ and $\mathcal{Y}$, but the algorithm shown here works perfectly without this assumption.
Functional Gradients¶
Consider solving the optimization problem using gradient descent: $$J(f) = \min_f \sum_{i=1}^n L(y^{(i)}, f(x^{(i)})).$$
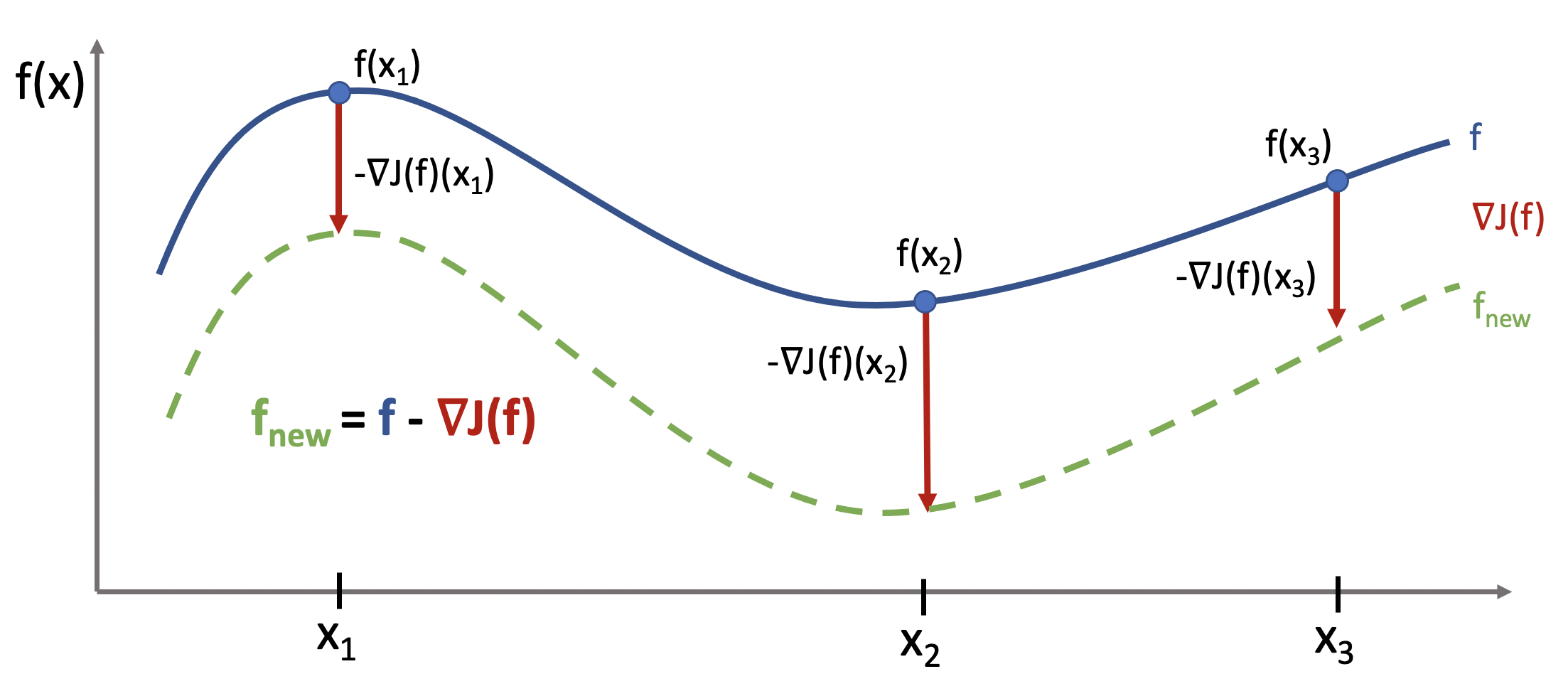
We may define the functional gradient of this loss at $f_0$ as a function $\nabla J(f_0) : \mathcal{X} \to \mathbb{R}$ $$\nabla J(f_0)(x) = \frac{\partial L(\text{y}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x), \text{y} = f^*(x)}.$$
Let's make a few observations about the functional gradient $$\nabla J(f_0)(x) = \frac{\partial L(\text{y}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x), \text{y} = f^*(x)}.$$
- It's an object indexed by $x \in \mathcal{X}$.
- At each $x \in \mathcal{X}$, $\nabla J(f_0)(x)$ tells us how to modify $f_0(x)$ to make $L(f^*(x), f_0(x))$ smaller.
This is best understood via a picture.
Functional Gradient Descent¶
We can optimize our objective using gradient descent in functional space via the usual update rule: $$f \gets f - \alpha \nabla J(f).$$
As defined, this is not a practical algorithm:
- Minimizing the objective is easy because it's unconstrained.
- The optimal $f$ only fits the training data, and doesn't generalize.
- We only know $J(f)$ at $n$ training points.
Modeling Functional Gradients¶
We will address this problem by learning a model of gradients.
- In supervised learning, we only have access to $n$ data points that describe the true $\mathcal{X} \to \mathcal{Y}$ mapping.
- We learn a model $f_\theta:\mathcal{X} \to \mathcal{Y}$ within a class $\mathcal{M}$ to approximate $f^*$.
- The model extrapolates beyond the training set. Given enough datapoints, $f_\theta$ learns a true mapping.
We will apply the same idea to gradients.
- We assume a model $g_\theta : \mathcal{X} \to R$ of the functional gradient $\nabla J(f)$ within a class $\mathcal{M}$. \begin{align*} g \in \mathcal{M} & & g \approx \nabla_\textbf{f} J(\textbf{f}) \end{align*}
- The model extrapolates beyond the training set. Given enough datapoints, $g_\theta$ learns $\nabla J(f)$.
Functional descent then has the form: $$\underbrace{f(x)}_\text{new function} \gets \underbrace{f(x) - \alpha g(x)}_\text{old function - gradient step}.$$ If $g$ generalizes, this approximates $f \gets f - \alpha \nabla J(f).$
Fitting Functional Gradients¶
What does it mean to approximate a functional gradient $g \approx \nabla_\textbf{f} J(\textbf{f})$ in practice? We can use standard supervised learning.
Suppose we have a fixed function $f$ and we want to estimate the functional gradient of $L$ $$\frac{\partial L(\text{y}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x), \text{y} = f^*(x)}.$$ at any $x \in \mathcal{X}$$
- We define a loss $L_g$ (e.g., L2 loss) measure how well $g \approx \nabla J(f)$.
- We compute $\nabla_\textbf{f} J(\textbf{f})$ on the training dataset: $$\mathcal{D}_g = \left\{ \left(x^{(i)}, \underbrace{\frac{\partial L(y^{(i)}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f(x^{(i)})}}_\text{functional derivative $\nabla_\textbf{f} J(\textbf{f})_i$ at $f(x^{(i)})$} \right), i=1,2,\ldots,n \right\} $$
- We train a model $g : \mathcal{X} \to \mathbb{R}$ on $\mathcal{D}_g$ to predict functional gradients at any $x$: $$ g(x) \approx \frac{\partial L(\text{y}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x), \text{y} = f^*(x)}.$$
Gradient Boosting¶
Gradient boosting is a procedure that performs functional gradient descent with approximate gradients.
Start with $f(x) = 0$. Then, at each step $t>1$:
- Create a training dataset $\mathcal{D}_g$ and fit $g_t(x^{(i)})$ using loss $L_g$: $$ g_t(x) \approx \frac{\partial L(\text{y}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x), \text{y} = f^*(x)}.$$
- Take a step of gradient descent using approximate gradients: $$f_t(x) = f_{t-1}(x) - \alpha \cdot g_t(x).$$
Interpreting Gradient Boosting¶
Notice how after $T$ steps we get an additive model of the form $$ f(x) = \sum_{t=1}^T \alpha_t g_t(x). $$ This looks like the output of a boosting algorithm!
- This works for any differentiable loss $L$.
- It does not require any mathematical derivations for new $L$.
Boosting vs. Gradient Boosting¶
Consider, for example, L2Boost, which optimizes the L2 loss $$ L(y, f) = \frac{1}{2}(y-f)^2. $$
At step $t$ we minimize $$\sum_{i=1}^n (r^{(i)}_t - g(x^{(i)}; \phi))^2, $$ where $r^{(i)}_t = y^{(i)} - f(x^{(i)})_{t-1}$ is the residual from the model at time $t-1$.
Observe that the residual $$r^{(i)}_t = y^{(i)} - f(x^{(i)})_{t-1}$$ is also the gradient of the $L2$ loss with respect to $f$ as $f(x^{(i)})$ $$r^{(i)}_t = \frac{\partial L(y^{(i)}, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f_0(x)}$$
Most boosting algorithms are special cases of gradient boosting in this way.
Losses for Gradient Boosting¶
Gradient boosting can optimize a wide range of losses.
- Regression losses:
- L2, L1, and Huber (L1/L2 interpolation) losses.
- Quantile loss: estimates quantiles of distribution of $p(y|x)$.
- Classification losses:
- Log-loss, softmax loss, exponential loss, negative binomial likelihood, etc.
Practical Considerations¶
When using gradient boosting these additional facts are useful:
- We most often use small decision trees as the learner $g_t$. Thus, input pre-processing is minimal.
- We can regularize by controlling tree size, step size $\alpha$, and using early stopping.
- We can scale-up gradient boosting to big data by subsampling data at each iteration (a form of stochastic gradient descent).
Algorithm: Gradient Boosting¶
- Type: Supervised learning (classification and regression).
- Model family: Ensembles of weak learners (often decision trees).
- Objective function: Any differentiable loss function.
- Optimizer: Gradient descent in functional space. Weak learner uses its own optimizer.
- Probabilistic interpretation: None in general; certain losses may have one.
Gradient Boosting: An Example¶
Let's now try running Gradient Boosted Decision Trees on a small regression dataset.
First we create the dataset.
# https://scikit-learn.org/stable/auto_examples/ensemble/plot_gradient_boosting_quantile.html
X = np.atleast_2d(np.random.uniform(0, 10.0, size=100)).T
X = X.astype(np.float32)
# Create dataset
f = lambda x: x * np.sin(x)
y = f(X).ravel()
dy = 1.5 + 1.0 * np.random.random(y.shape)
noise = np.random.normal(0, dy)
y += noise
# Visualize it
xx = np.atleast_2d(np.linspace(0, 10, 1000)).T
plt.plot(xx, f(xx), 'g:', label=r'$f(x) = x\,\sin(x)$')
plt.plot(X, y, 'b.', markersize=10, label=u'Observations')
[<matplotlib.lines.Line2D at 0x12ed61898>]

Next, we train a GBDT regressor.
from sklearn.ensemble import GradientBoostingRegressor
alpha = 0.95
clf = GradientBoostingRegressor(loss='ls', alpha=alpha,
n_estimators=250, max_depth=3,
learning_rate=.1, min_samples_leaf=9,
min_samples_split=9)
clf.fit(X, y)
GradientBoostingRegressor(alpha=0.95, min_samples_leaf=9, min_samples_split=9,
n_estimators=250)
We may now visualize its predictions
y_pred = clf.predict(xx)
plt.plot(xx, f(xx), 'g:', label=r'$f(x) = x\,\sin(x)$')
plt.plot(X, y, 'b.', markersize=10, label=u'Observations')
plt.plot(xx, y_pred, 'r-', label=u'Prediction')
[<matplotlib.lines.Line2D at 0x12c98e438>]

Pros and Cons of Gradient Boosting¶
Gradient boosted decision trees (GBTs) are one of the best off-the-shelf ML algorithms that exist, often on par with deep learning.
- Attain state-of-the-art performance. GBTs have won the most Kaggle competitions.
- Require little data pre-processing and tuning.
- Work with any objective, including probabilistic ones.
Their main limitations are:
- GBTs don't work with unstructured data like images, audio.
- Implementations not as flexible as modern neural net libraries.
Functional Optimization¶
Functional optimization offers a different angle on boosting algorithms and a recipe for new algorithms.
- Consider optimizing a loss over arbitrary functions $f: \mathcal{X} \to \mathcal{Y}$.
- Since we only have $n$ datapoints, this reduces to optimizing over vectors $\textbf{f} \in \mathbb{R}^n$
- Thus, functional optimization consists in solving the problem $$ \min_\textbf{f} \sum_{i=1}^n L(y^{(i)}, \textbf{f}_i). $$
Functional Gradients¶
Consider solving the optimization problem using gradient descent: $$J(\textbf{f}) = \min_\textbf{f} \sum_{i=1}^n L(y^{(i)}, \textbf{f}_i).$$ We may define the functional gradient of this loss as $$\nabla_\textbf{f} J(\textbf{f}) = \begin{bmatrix} \frac{\partial L(y^{(1)}, \textbf{f}_1)}{\partial \textbf{f}_1} \\ \frac{\partial L(y^{(2)}, \textbf{f}_2)}{\partial \textbf{f}_2} \\ \vdots \\ \frac{\partial L(y^{(n)}, \textbf{f}_n)}{\partial \textbf{f}_n} \\ \end{bmatrix}.$$
Functional Gradient Descent¶
We can optimize our objective using gradient descent in functional space via the usual update rule: $$\textbf{f} \gets \textbf{f} - \alpha \nabla_\textbf{f} J(\textbf{f}).$$
As defined, this is not a practical algorithm:
- Minimizing the objective is easy because it's unconstrained.
- The optimal $\textbf{f}$ only fits the training data, and doesn't generalize.
- We want a way to optimize $J(\textbf{f})$ at any $n$ training points.
Modeling Functional Gradients¶
We will address this problem by learning a model of gradients.
In supervised learning, we define a model $f:\mathcal{X} \to \mathcal{Y}$ for $\textbf{f}$ within a class $\mathcal{M}$. \begin{align*} f \in \mathcal{M} & & f \approx \textbf{f} \end{align*} The model extrapolates beyond the training set and ensures we generalize.
We will apply the same idea to gradients. We assume a model $g : \mathcal{X} \to R$ of the functional gradient $\nabla_\textbf{f} J(\textbf{f})$ within a class $\mathcal{M}$. \begin{align*} g \in \mathcal{M} & & g \approx \nabla_\textbf{f} J(\textbf{f}) \end{align*} Our model of gradients can generalize beyond the training set.
Functional descent then has the form: $$\underbrace{f(x)}_\text{new function} \gets \underbrace{f(x) - \alpha g(x)}_\text{old function - gradient step}.$$ If $g$ generalizes, this approximates $\textbf{f} \gets \textbf{f} - \alpha \nabla_\textbf{f} J(\textbf{f})$ at any $n$ points.
Fitting Functional Gradients¶
What does it mean to approximate a functional gradient $g \approx \nabla_\textbf{f} J(\textbf{f})$ in practice? We can use standard supervised learning.
Suppose we have a fixed function $f$ and we want to estimate the functional gradient of $L$ $$ \frac{\partial L(y, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f(x)}$$ at any value of $f(x)$.
- We define a loss $L_g$ (e.g., L2 loss) measure how well $g \approx \nabla_\textbf{f} J(\textbf{f})$.
- We compute $\nabla_\textbf{f} J(\textbf{f})$ on the training dataset: $$\mathcal{D}_g = \left\{ \left(x^{(i)}, \underbrace{\frac{\partial L(y, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f(x^{(i)})}}_\text{functional derivative $\nabla_\textbf{f} J(\textbf{f})_i$ at $f(x^{(i)})$} \right), i=1,2,\ldots,n \right\} $$
- We train a model $g : \mathcal{X} \to \mathbb{R}$ on $\mathcal{D}_g$ to predict functional gradients at any $x$: $$ g(x) \approx \frac{\partial L(y, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f(x)}$$
Gradient Boosting¶
Gradient boosting is a procedure that performs functional gradient descent with approximate gradients.
Start with $f(x) = 0$. Then, at each step $t>1$:
- Create a training dataset $\mathcal{D}_g$ and fit $g_t(x^{(i)})$ using loss $L_g$: $$ g_t(x) \approx \frac{\partial L(y, \text{f})}{\partial \text{f}} \bigg\rvert_{\text{f} = f(x)}.$$
- Take a step of gradient descent using approximate gradients: $$f_t(x) = f_{t-1}(x) - \alpha \cdot g_t(x).$$
Interpreting Gradient Boosting¶
Notice how after $T$ steps we get an additive model of the form $$ f(x) = \sum_{t=1}^T \alpha_t g_t(x). $$ This looks like the output of a boosting algorithm!
- This works for any differentiable loss $L$.
- It does not require any mathematical derivations for new $L$.
Losses for Gradient Boosting¶
Gradient boosting can optimize a wide range of losses.
- Regression losses:
- L2, L1, and Huber (L1/L2 interpolation) losses.
- Quantile loss: estimates quantiles of distribution of $p(y|x)$.
- Classification losses:
- Log-loss, softmax loss, exponential loss, negative binomial likelihood, etc.
Practical Considerations¶
When using gradient boosting these additional facts are useful:
- We most often use small decision trees as the learner $g_t$. Thus, input pre-processing is minimal.
- We can regularize by controlling tree size, step size $\alpha$, and using early stopping.
- We can scale-up gradient boosting to big data by subsampling data at each iteration (a form of stochastic gradient descent).
Algorithm: Gradient Boosting¶
- Type: Supervised learning (classification and regression).
- Model family: Ensembles of weak learners (often decision trees).
- Objective function: Any differentiable loss function.
- Optimizer: Gradient descent in functional space. Weak learner uses its own optimizer.
- Probabilistic interpretation: None in general; certain losses may have one.
Gradient Boosting: An Example¶
Let's now try running Gradient Boosted Decision Trees on a small regression dataset.
First we create the dataset.
# https://scikit-learn.org/stable/auto_examples/ensemble/plot_gradient_boosting_quantile.html
X = np.atleast_2d(np.random.uniform(0, 10.0, size=100)).T
X = X.astype(np.float32)
# Create dataset
f = lambda x: x * np.sin(x)
y = f(X).ravel()
dy = 1.5 + 1.0 * np.random.random(y.shape)
noise = np.random.normal(0, dy)
y += noise
# Visualize it
xx = np.atleast_2d(np.linspace(0, 10, 1000)).T
plt.plot(xx, f(xx), 'g:', label=r'$f(x) = x\,\sin(x)$')
plt.plot(X, y, 'b.', markersize=10, label=u'Observations')
[<matplotlib.lines.Line2D at 0x12ed61898>]
Next, we train a GBDT regressor.
from sklearn.ensemble import GradientBoostingRegressor
alpha = 0.95
clf = GradientBoostingRegressor(loss='ls', alpha=alpha,
n_estimators=250, max_depth=3,
learning_rate=.1, min_samples_leaf=9,
min_samples_split=9)
clf.fit(X, y)
GradientBoostingRegressor(alpha=0.95, min_samples_leaf=9, min_samples_split=9,
n_estimators=250)
We may now visualize its predictions
y_pred = clf.predict(xx)
plt.plot(xx, f(xx), 'g:', label=r'$f(x) = x\,\sin(x)$')
plt.plot(X, y, 'b.', markersize=10, label=u'Observations')
plt.plot(xx, y_pred, 'r-', label=u'Prediction')
[<matplotlib.lines.Line2D at 0x12c98e438>]
Pros and Cons of Gradient Boosting¶
Gradient boosted decision trees (GBTs) are one of the best off-the-shelf ML algorithms that exist, often on par with deep learning.
- Attain state-of-the-art performance. GBTs have won the most Kaggle competitions.
- Require little data pre-processing and tuning.
- Work with any objective, including probabilistic ones.
Their main limitations are:
- GBTs don't work with unstructured data like images, audio.
- Implementations not as flexible as modern neural net libraries.